El diseño estructural y mecánico se desarrolló, a partir del esquema de distribución de patas en los insectos y y su modalidad de locomoción por trípode alternante. Surgió la posibilidad de armar la estructura sostén de los diversos equipos, con perfiles standard de aluminio de bajo peso y a partir de ésto se comenzó a trabajar con la disposición, anclaje y geometría de las patas para lograr que las mismas se elevaran 8 cm. y giraran en el plano axial horizontal entre un rango de ± 30º de su posición original (amplitud 30º). Este estudio geométrico y cinemático se realizó con programas tales como AUTOCAD12 en lo que hace al diseño mecánico asistido por computadora y, el Cabrí que fue usado para el estudio de trayectorias, topología de anclajes y centros de giro.
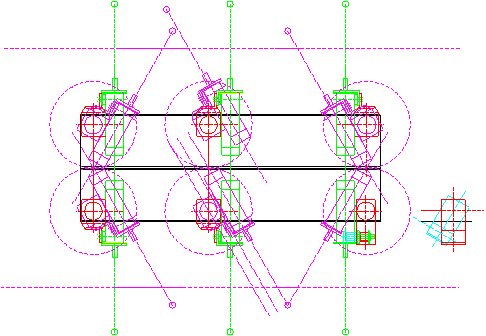
Ambos nos permiten probar diversas longitudes y comportamientos cinemáticos de las patas, hasta llegar a las dimensiones finales, aproximadas que permitían alcanzar un tiempo de elevación de patas en una relación acorde al tiempo de giro de cada una de ellas. Los motores preseleccionados para cada una de ellas son del tipo: Motor de Alimentación Continua, 12 Volts; con una cupla de relación peso- potencia adecuada al trabajo a realizar; el Motor HORIZONTAL de 258 rpm y el VERTICAL de 9 rpm. Luego se construyo un prototipo de pata que fue sometido a diversas pruebas para verificar su comportamiento bajo diversas cargas y en las condiciones más cercanas a las de trabajo. A partir de lo cual se determinó que se debían colocar rodamientos axiales o crapodinas a los motores de elevación Motor B y anclar a los motores de giro, Motor A, al chasis por la punta del eje de los mismos. Para el anclaje se utilizaron 3 travesaños de caño cuadrado estructural a los cuales se le efectuaron rebajes y soldaduras necesarios para que dichos motores quedaran lo más seguramente fijados. Definidos estos aspectos de la pata, quedó (esquemáticamente) como lo observamos en la figura.
Luego de ésto se aceleró el proceso de fabricación en serie
de las otras cinco patas y la estructura principal con
sobrematerial en las partes posterior y anterior para el montaje
de otros dispositivos que llevaría el prototipo .
Por ejemplo: Cámara de Video, servo para la cabeza, giróscopo,
transmisor de video y transmisor de radio,etc
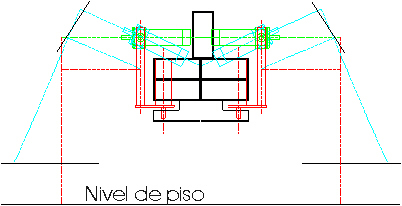
Otra cuestión que se tuvo en cuenta fue la ubicación de las
baterías en procura de bajar el centro de gravedad de la
estructura lo máximo posible para darle mayor estabilidad
durante el movimiento a la misma. Finalmente se colocó una
batería montada sobre cada pata, mejorando los baricentros
estáticos y dinámicos. Los puntos de contacto del prototipo con
el suelo se adaptan a la superficie por medio de una rótula,
para conseguir estabilidad en terrenos escarpados e
irregulares.También se consideró la distribución de cargas a
efectos de que, la dirección de la fuerza peso del conjunto, no
saliera fuera de la base variable de sustentación generada por
la intersección de los triángulos determinados por los
trípodes alternantes de las patas.
