Teniendo en cuenta las premisas del diseño en general,
comentadas en el punto 3-2 se desarrollaron e implementaron
distintas tecnologías concurrentes: programación de
microcontroladores en lenguaje de máquina, su vinculación en
red de datos con protocolos especiales; manejo de señales de
distintos tipos de sensores; controles de potencia sobre
distintos motores y servos; captación, transmisión y
reconocimento de señal de video; transmisión de radiofrecuencia
y sintetizado de voz etc; manejo de fuentes de energía de alto
rendimiento y cableado estructurado de las distintos bloques que
componen los sistemas del robot insectoide.
La siguiente es una descripción del principio de funcionamiento
de los circuitos del robot en bloques, como así también su
evolución a lo largo del desarrolo del proyecto.
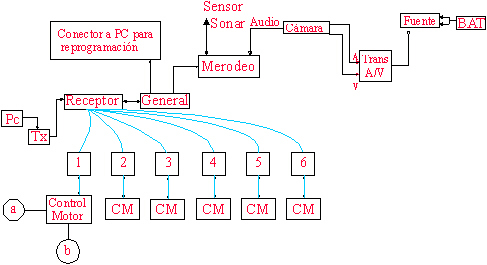
Toda la información se coordina desde ocho centros de
procesamiento de datos: uno por cada una de las seis patas, otro
que sirve de vínculo entre éstas y el último (módulo de
merodeo) se encarga del control de los sensores que sirven para
ubicar al insectoide y comunicarlo con el mundo (por ejemplo:
cámara de video, sensores de longitud delanteros y traseros,
bigotes de gato, movimiento de la cabeza , zumbador, sintetizador
de voz, micrófono ). La comunicación de datos se realiza por
medio de una red que recorre todos los microcontroladores. En el
primer modelo experimental, cada uno de estos microcontroladores
estaba situado en una placa individual, la que medía por medio
de potenciómetros ubicados en los ejes de la pata
correspondiente la posición de la misma, comandando los motores
por medio de una etapa de potencia conectada con el micro. Esta
etapa controlaba los motores con un generador de corriente
constante y mediante un conversor de un bit detectaba, cuando el
motor se estaba esforzando más de lo establecido. Esta
información llegaba al micro correspondiente a la pata. El nivel
alto del conversor se regulaba por medio de un potenciómetro de
presición sensando el consumo de la pata ,cuando ésta apoyaba
en el suelo.
Esta tecnología fue mejorada porque el generador tenía poco
rendimiento y el conversor no era tan preciso como se necesitaba
en ciertas ocasiones. Actualmente el microcontrolador se
encuentra con la etapa de potencia en la misma placa. El comando
de los motores no es con corriente constante y utiliza relés,
porque tienen mayor rendimiento para bajas tensiones y además se
puede frenar el motor una vez desconectado. La regulación del
nivel del sobre-esfuerzo ya no es más una regulación sino una
lectura, por medio de un conversor rápido analógico -digital de
seis bit, y el microcontrolador decide cuando es excesivo,
dependiendo de la topología del comportamiento que esté
utilizando en cada momento. La comunicación por medio de la red
se ha optimizado también con el uso de cableado en paralelo tipo
bus, pero la información sigue viajando en serie.
Al principio, las imágenes tomadas por la cámara de video en
blanco y negro eran transmitidas mediante un transmisor de Radio
Frecuencia hacia una PC que hacía el reconocimiento de figuras
predeterminadas. mediante una placa capturadora y editora,
trabajando conjuntamente con algoritmos de reconocimiento simples
que logramos desarrollar. Actualmente estamos trabajando para
procesar video con una placa experimental diseñada para ser
alojada en la estructura del robot, guardando y comparando
imagenes en un banco de memoria propio. Para proveer energia
autónoma para la alimentacion del robot insectoide,
utilizábamos dos baterías: una de plomo-gel de 12V/7Ah para los
motores y un pack de níquel cadmio (Ni-Cd) de 12V/2Ah para el
resto de los circuitos. Uno de los motivos de tener alimentación
independiente es para inmunizar el ruido en los circuitos en
donde éste es perjudicial. Actualmente, la batería de plomo,
que antes estaba en el centro (para no modificar el baricentro),
fue dividida en seis de 12V/1,2Ah c/u, una sobre cada pata, de
manera que el peso muerto de éstas esté apoyado diréctamente
en el piso y no generando un momento, a contrarrestar con
respecto a la estructura central del robot, mejorando la
distribución de cargas, la optimización de la energía
disponible y la relacion peso-potencia-autonomía. Otro factor
tenido en cuenta es el del mejor aprovechamiento de la energía
acumulada en las baterías de los motores, ya que la curva de
descarga de éstas no es óptima por el siguiente factor: cuando
la tensión baja de 12V a 10V aproximadamente, los motores
comienzan a funcionar más lento, y además la corriente se eleva
para poder entregar la misma potencia y el medidor de
sobre-esfuerzo se "confunde". Para solucionar este
problema estamos desarrollando fuentes switching, con las que se
puede elevar la tensión disponible, para poder obtener la
energía requerida al caer la tensión de las baterías.